













Về Chúng Tôi
CÔNG TY CỔ PHẦN THIẾT BỊ ANTTEK VIỆT NAM được thành lập và phát triển với sự năng động, sáng tạo và nỗ lực đã và đang lớn mạnh không ngừng, ngày càng phát triển cùng với sự phát triển vượt bậc về mặt công nghệ tự động hóa.
Anttek AGV được thành lập và phát triển với sự năng động, sáng tạo và nỗ lực đã và đang lớn mạnh không ngừng, ngày càng phát triển cùng với sự phát triển vượt bậc về mặt công nghệ tự động hóa.
Với đội ngũ kỹ sư thiết kế, chuyên viên tư vấn giải pháp, chuyên viên kỹ thuật nhiều năm kinh nghiệm trong các lĩnh vực: tự động hóa , điện, điện tử, cơ khí, …Anttek AGV cung cấp giải pháp tự động hóa, xe tự hành AGV, Robots… với mục tiêu giúp các doanh nghiệp nâng cao năng suất, chất lượng và hiệu quả lao động, giảm bớt sức lao động của con người và góp phần nâng cao giá trị cuộc sống của người Việt.

DỰ ÁN

Lễ ra mắt và bàn giao sản phẩm AGV CMG-MCARRY - Xe tự hành chở được trang bị các tầng khay chứa có thể là các nâng, hạ chuyền động bằng băng tải ,đai hoăc xích.

Logistics ABC - Xe kéo AGV có thể kéo được nhiều loại toa hàng khác nhau và chở được từ 500 đến 2000kg.

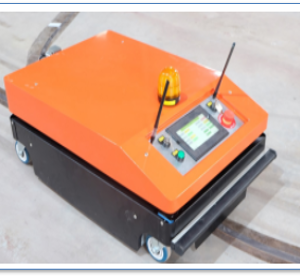
Trung tâm Logistics - AGV loại nhỏ, ứng dụng trong chở hàng và phân loại hàng cỡ nhỏ dưới 100kg, thích hợp trong các nhà kho…





